Electrical motors are everywhere around us. Almost all the electro-mechanical movements we see around us are caused either by a AC or a DC motor. Here we will be exploring DC motors. This is a device that converts DC electrical energy to a mechanical energy

Principle of DC Motor
This DC or direct current motor works on the principal, when a current carrying conductor is placed in a magnetic field, it experiences a torque and has a tendency to move.This is known as motoring action. If the direction of current in the wire is reversed, the direction of rotation also reverses. When magnetic field and electric field interact they produce a mechanical force, and based on that the working principle of DC motor is established.
 The direction of rotation of a this motor is given by Fleming’s left hand rule, which states that if the index finger, middle finger and thumb of your left hand are extended mutually perpendicular to each other and if the index finger represents the direction of magnetic field, middle finger indicates the direction of current, then the thumb represents the direction in which force is experienced by the shaft of the DC motor.
The direction of rotation of a this motor is given by Fleming’s left hand rule, which states that if the index finger, middle finger and thumb of your left hand are extended mutually perpendicular to each other and if the index finger represents the direction of magnetic field, middle finger indicates the direction of current, then the thumb represents the direction in which force is experienced by the shaft of the DC motor.
Structurally and construction wise a direct current motor is exactly similar to a DC generator, but electrically it is just the opposite. Here we unlike a generator we supply electrical energy to the input port and derive mechanical energy from the output port. We can represent it by the block diagram shown below. Here in a DC motor, the supply voltage E and current I is given to the electrical port or the input port and we derive the mechanical output i.e. torque T and speed ω from the mechanical port or output port.
Here in a DC motor, the supply voltage E and current I is given to the electrical port or the input port and we derive the mechanical output i.e. torque T and speed ω from the mechanical port or output port.
Here in a DC motor, the supply voltage E and current I is given to the electrical port or the input port and we derive the mechanical output i.e. torque T and speed ω from the mechanical port or output port.
The input and output port variables of the direct current motor are related by the parameter K. So from the picture above we can well understand that motor is just the opposite phenomena of a DC generator, and we can derive both motoring and generating operation from the same machine by simply reversing the ports.
So from the picture above we can well understand that motor is just the opposite phenomena of a DC generator, and we can derive both motoring and generating operation from the same machine by simply reversing the ports.
So from the picture above we can well understand that motor is just the opposite phenomena of a DC generator, and we can derive both motoring and generating operation from the same machine by simply reversing the ports.Detailed Description of a DC Motor
To understand the DC motor in details lets consider the diagram below, The direct current motor is represented by the circle in the center, on which is mounted the brushes, where we connect the external terminals, from where supply voltage is given. On the mechanical terminal we have a shaft coming out of the Motor, and connected to the armature, and the armature-shaft is coupled to the mechanical load. On the supply terminals we represent the armature resistance Ra in series. Now, let the input voltage E, is applied across the brushes. Electric current which flows through the rotor armature via brushes, in presence of the magnetic field, produces a torque Tg. Due to this torque Tg the dc motor armature rotates. As the armature conductors are carrying currents and the armature rotates inside the stator magnetic field, it also produces an emf Eb in the manner very similar to that of a generator. The generated Emf Eb is directed opposite to the supplied voltage and is known as the back Emf, as it counters the forward voltage.
The direct current motor is represented by the circle in the center, on which is mounted the brushes, where we connect the external terminals, from where supply voltage is given. On the mechanical terminal we have a shaft coming out of the Motor, and connected to the armature, and the armature-shaft is coupled to the mechanical load. On the supply terminals we represent the armature resistance Ra in series. Now, let the input voltage E, is applied across the brushes. Electric current which flows through the rotor armature via brushes, in presence of the magnetic field, produces a torque Tg. Due to this torque Tg the dc motor armature rotates. As the armature conductors are carrying currents and the armature rotates inside the stator magnetic field, it also produces an emf Eb in the manner very similar to that of a generator. The generated Emf Eb is directed opposite to the supplied voltage and is known as the back Emf, as it counters the forward voltage.The back emf like in case of a generator is represented by
 Where, P = no of poles
Where, P = no of polesφ = flux per pole
Z= No. of conductors
A = No. of parallel paths
and N is the speed of the DC Motor.
So, from the above equation we can see Eb is proportional to speed ‘N’. That is whenever a direct current motor rotates, it results in the generation of back Emf. Now lets represent the rotor speed by ω in rad/sec. So Eb is proportional to ω.
So, when the speed of the motor is reduced by the application of load, Eb decreases. Thus the voltage difference between supply voltage and back emf increases that means E − Ebincreases. Due to this increased voltage difference, armature current will increase and therefore torque and hence speed increases. Thus a DC Motor is capable of maintaining the same speed under variable load.
Now armature current Ia is represented by
 Now at starting,speed ω = 0 so at starting Eb = 0.
Now at starting,speed ω = 0 so at starting Eb = 0. Now since the armature winding electrical resistance Ra is small, this motor has a very high starting current in the absence of back Emf. As a result we need to use a starter for starting a DC Motor.
Now since the armature winding electrical resistance Ra is small, this motor has a very high starting current in the absence of back Emf. As a result we need to use a starter for starting a DC Motor.Now as the motor continues to rotate, the back Emf starts being generated and gradually the current decreases as the motor picks up speed.
Types of DC Motors
Direct motors are named according to the connection o the field winding with the armature. There are 3 types:- Shunt wound DC motor
- Series wound DC motor
- Compound wound DC motorOn application of load the speed of a DC motor decreases gradually. This is not at all desirable. So the difference between no load and full load speed should be very less. The motor capable of maintaining a nearly constant speed for varying load is said to have good speed regulation i.e the difference between no load and full load speed is quite less. The speed regulation of a permanent magnet DC motor is good ranging from 10 - 15% whereas for DC shunt motor it is somewhat less than 10 %. DC series motor has poor value of regulation. In case of compound DC motor for DC cumulative compound the speed regulation is around 25 % while differential compound has its excellent value of 5 %.
Speed of a DC Motor
The emf equation of DC motor is given by Here,
Here,
N = speed of rotation in rpm.
P = number of poles.
A = number of parallel paths.
Z = total no. conductors in armature.
 Hence, speed of a DC motor is directly proportional to emf of rotation (E) and inversely proportional to flux per pole (φ).
Hence, speed of a DC motor is directly proportional to emf of rotation (E) and inversely proportional to flux per pole (φ).Speed Regulation of a DC Motor
The speed regulation is defined as the change in speed from no load to full load, expressed as a fraction or percentage of full load speed.
Therefore, as per definition per unit (p.u) speed regulation of DC motor is given as, Similarly, percentage (%) speed regulation is given as,
Similarly, percentage (%) speed regulation is given as, Where,
Where, Therefore,
Therefore, A motor which has nearly constant speed at all load below full rated load, have good speed regulation.Speed control means intentional change of the drive speed to a value required for performing the specific work process. Speed control is a different concept from speed regulation where there is natural change in speed due change in load on the shaft. Speed control is either done manually by the operator or by means of some automatic control device.One of the important features of DC motor is that its speed can be controlled with relative ease. We know that the emf equation of DC motor is given as,N = 60A E / PZØ
A motor which has nearly constant speed at all load below full rated load, have good speed regulation.Speed control means intentional change of the drive speed to a value required for performing the specific work process. Speed control is a different concept from speed regulation where there is natural change in speed due change in load on the shaft. Speed control is either done manually by the operator or by means of some automatic control device.One of the important features of DC motor is that its speed can be controlled with relative ease. We know that the emf equation of DC motor is given as,N = 60A E / PZØ
N = E / kØ
where, k = PZ/60A
N = V - Ia Ra / kØTherefore speed (N) of 3 types of DC motor – SERIES, SHUNT and COMPOUND can be controlled by changing the quantities on RHS of the expression. So speed can be varied by changing- Terminal voltage of the armature V.
- External resistance in armature circuit Ra.
- Flux per pole φ.
The first two cases involve change that affects armature circuit and the third one involves change in magnetic field. Therefore speed control of DC motor is classified as- Armature control methods
- Field control methods.
Speed Control of DC Series Motor
Speed control of DC series motor can be done either by armature control or by field control.Armature Control of DC Series Motor
Speed adjustment of DC series motor by armature control may be done by any one of the methods that follow,- Armature Resistance Control Method:
This is the most common method employed. Here the controlling resistance is connected directly in series with the supply of the motor as shown in the fig.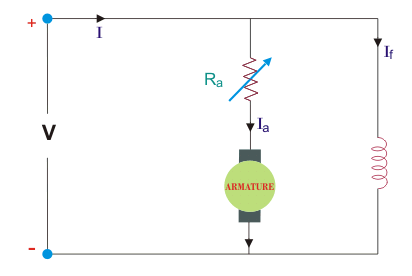 The power loss in the control resistance of DC series motor can be neglected because this control method is utilized for a large portion of time for reducing the speed under light load condition. This method of speed control is most economical for constant torque. This method of speed control is employed for DC series motor driving cranes, hoists, trains etc.
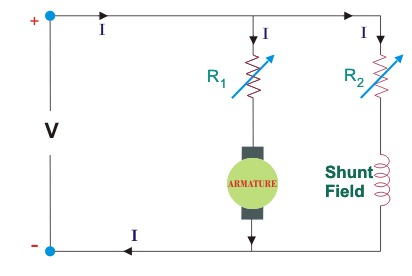
The power loss in the control resistance of DC series motor can be neglected because this control method is utilized for a large portion of time for reducing the speed under light load condition. This method of speed control is most economical for constant torque. This method of speed control is employed for DC series motor driving cranes, hoists, trains etc. - Shunted Armature Control:
The combination of a rheostat shunting the armature and a rheostat in series with the armature is involved in this method of speed control. The voltage applied to the armature is varies by varying series rheostat R1. The exciting current can be varied by varying the armature shunting resistance R2. This method of speed control is not economical due to considerable power losses in speed controlling resistances. Here speed control is obtained over wide range but below normal speed. - Armature terminal voltage control:
The speed control of DC series motor can be accomplished by supplying the power to the motor from a separate variable voltage supply. This method involves high cost so it rarely used.
Field Control of DC Series Motor
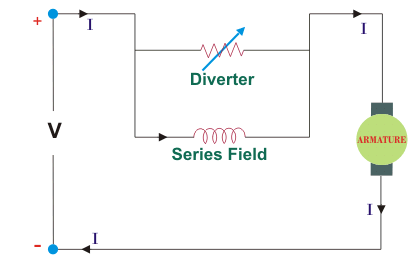
The speed of DC motor can be controlled by this method by any one of the following ways –- Field Diverter Method
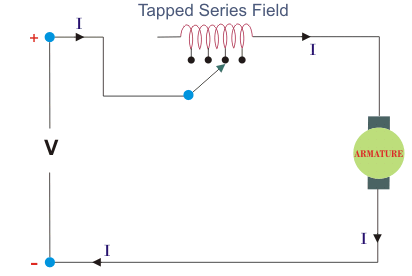
This method uses a diverter. Here the field flux can be reduced by shunting a portion of motor current around the series field. Lesser the diverter resistance less is the field current, less flux therefore more speed. This method gives speed above normal and the method is used in electric drives in which speed should rise sharply as soon as load is decreased. - Tapped Field Control
This is another method of increasing the speed by reducing the flux and it is done by lowering number of turns of field winding through which current flows. In this method a number of tapping from field winding are brought outside. This method is employed in electric traction.
Speed Control of DC Shunt Motor
Speed of DC shunt motor is controlled by the factors stated belowField Control of DC Shunt Motor
By this method speed control is obtained by any one of the following means –Field Rheostat Control of DC Shunt Motor
In this method, speed variation is accomplished by means of a variable resistance inserted in series with the shunt field. An increase in controlling resistances reduces the field current with a reduction in flux and an increase in speed. This method of speed control is independent of load on the motor. Power wasted in controlling resistance is very less as field current is a small value. This method of speed control is also used in DC compound motor.
Limitations of this Method of Speed Control- Creeping speeds cannot be obtained.
- Top speeds only obtained at reduced torque.
- The speed is maximum at minimum value of flux, which is governed by the demagnetizing effect of armature reaction on the field.
Field Voltage Control
This method requires a variable voltage supply for the field circuit which is separated from the main power supply to which the armature is connected. Such a variable supply can be obtained by an electronic rectifier.
Armature Control of DC Shunt Motor
Speed control by this method involves two ways. These are :Armature Resistance Control
In this method armature circuit is provided with a variable resistance. Field is directly connected across the supply so flux is not changed due to variation of series resistance. This is applied for DC shunt motor. This method is used in printing press, cranes, hoists where speeds lower than rated is used for a short period only.Armature Voltage Control
This method of speed control needs a variable source of voltage separated from the source supplying the field current. This method avoids disadvantages of poor speed regulation and low efficiency of armature-resistance control methods. The basic adjustable armature voltage control method of speed d control is accomplished by means of an adjustable voltage generator is called Ward Leonard System. This method involves using a motor-generator (M-G) set. This method is best suited for steel rolling mills, paper machines, elevators, mine hoists, etc. This method is known as Ward-Leonard System.
Advantages- Very fine speed control over whole range in both directions
- Uniform acceleration is obtained
- Good speed regulation
- It has regenerative braking capacity
- Costly arrangement is needed , floor space required is more
- Low efficiency at light loads
- Drive produced more noise.
Solid State Speed Control
Static Ward Leonard drives are being used these days because of the drawbacks of the classical method. Rotating M-G sets are replaced by solid state converters to control DC motor speed. The converters used are choppers (in case of DC supply) or controlled rectifiers (in case of AC supply). This method is not suitable for intermittent loads.
No comments:
Post a Comment